Time testing between events
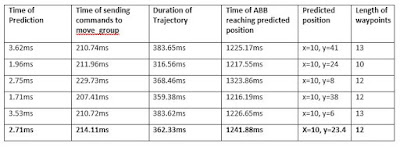
Hi, After playing around with the speed of the ABB, I wanted to find out what is still causing the delay between the point that the puck is moving towards the robot, trajectory prediction, the time of sending commands to the move_group node and to when the robot actually reaches that position. Below are my results from the investigation of five samplings. Testing Results As shown in the results, the robot reaches the predicted position an average of 1241.88ms after the puck is moving towards the robot. One possible cause for the initial delay of the robot's motion is having low computer performance which could slow down the process of finding a plan to perform on the robot. To remove doubt of the computer's performance, I did the same test but without running RViz as the simulator used almost 40% of the CPU. However, the results returned similar behaviour and averaged 1263.69ms from the time that the puck is moving towards the puck and the time when the robot actual...
